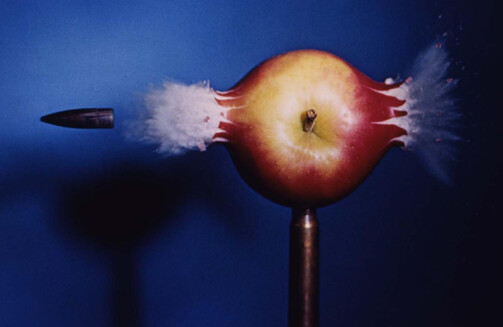
1964年,MIT的Harold Edgerton教授拍摄了这张“穿越苹果的子弹”的照片。
这种超快速测量技术能够捕捉在1.85 皮秒(1 皮秒 = 10-12 秒)中发生的事件,它甚至能够捕捉到光的瞬间传输状态,便是飞行时间(time of flight,ToF)技术的前身。
ToF(time of flight)技术是将时间维度的信息转换为空间维度信息的方法,其本质原理是: 距离=速度*时间。光在真空中的速度是299792458米/秒,只要能测定出光的运动时间,就能测出其飞行距离。
自然界有很多动物天生就具备类似的能力,最典型的就是我们熟知的蝙蝠和海豚。它们都能够通过发出特定频率的声波并捕捉回声,进而判断前方物体的距离。
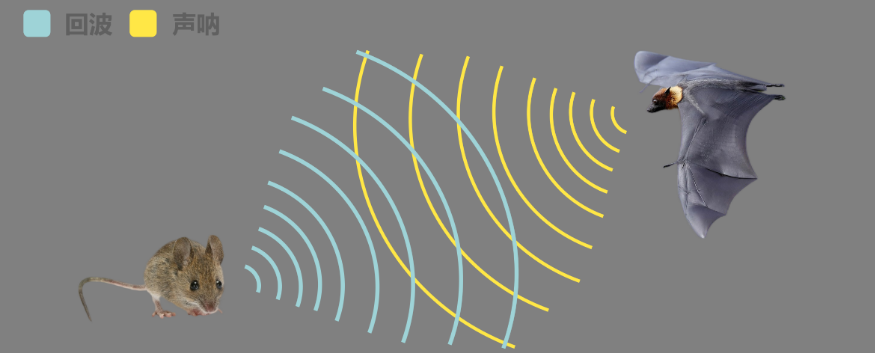
自然界超声波测距
飞行时间激光扫描仪(又被称为 LIDAR 系统或激光雷达)采用时域方法进行3D测量,通过测量发射激光与物体表面反射激光之间的时间延迟来获得精确的距离测量值。
- 时间作为“基线”,深度计算精度不随距离改变而变化;
- 抗干扰能力强,无遮挡影响、不受物体表面灰度和特征影响;
- 大测量范围(数百米),调节发射脉冲频率可改变相机测量;
- 设计的复杂性、光的物理特性以及由于测量原理本身的原因,TOF 相机在 10m 的范围内的理论精度低于结构光系统;
- 没有颜色数据;对反射敏感;
- 分辨率不高(VGA);
大范围运动的应用场合,如无人驾驶、汽车测距和基于视觉的安全系统。
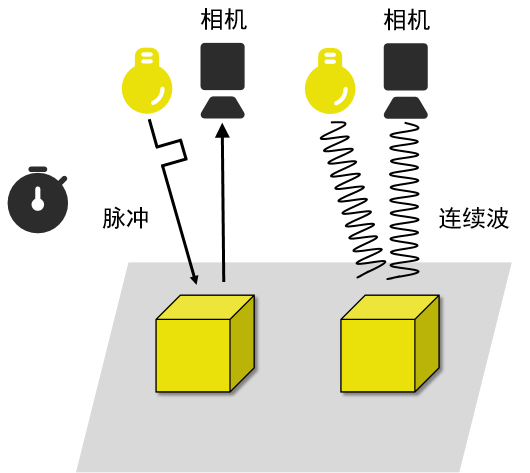
根据调制方法不同,ToF法可以分为:脉冲调制(pulsed modulation)和连续波调制(continuous wave modulation)。
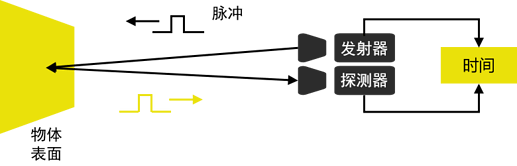
又被称作直接飞行时间法(direct time of flight,dToF),其经典应用就是激光雷达扫描仪。
| 原理 | 检测往返激光脉冲的时间延迟计算距离,需要高速检测装置,适用于大型物件的测量。 |
|---|---|
| 优点 | 测量方法简单,响应较快;发射端能量高,降低环境光干扰;受多径干扰的影响小。 |
| 缺点 | 系统昂贵,为了精确的测量飞行时间,发射脉冲时间必须在皮秒级、激光脉冲光源必须具有百万焦耳级功率、传感器必须具有超皮秒级时间分辨率和超高动态范围;“时间线”很短,较短的基线导致精度(或深度分辨率)降低。 |
| 适用类型 |
|
| 示意图 |
|
又被称作间接飞行时间法(indirect time of flight,iToF)。
| 原理 | 检测往返激光正弦波的相位差计算距离,测量精度高,适用于小型物体精密测量。 |
|---|---|
| 优点 | 与脉冲飞行时间法相比,精度更高;对光源要求不高。 |
| 缺点 | 测量范围缩小;对环境照明(如阳光)和反射的灵敏度增加;需要多次采样积分,测量时间较长,限制相机帧率、测量运动物体时可能产生运动模糊。;“时间线”很短,较短的基线导致精度(或深度分辨率)降低。 |
| 适用类型 |
连续波iTOF面阵芯片,代表:Sony IMX570。 |
| 示意图 |
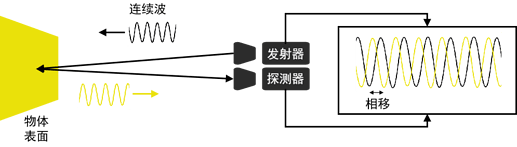
|